
АКЦІЇ! ПЕРЕГЛЯНУТИ ПОВНИЙ ПЕРЕЛІК ДОСТУПНИХ ПРОПОЗИЦІЙ МОЖНА ТУТ
Категорії новин:
Ітеративна корекція руху – альтернативне вирішення проблеми рухів пацієнта під час сканування
Корекцію IMC можна застосувати до руху твердого тіла, наприклад голови. Рух твердого тіла спрощується, для того, щоб оцінити та виправити величину переміщення та обертання. Процес показано на рис. 1. IMC завжди використовує свого роду паралельну реконструкцію зображень, щоб отримати дані FSE із неповною вибіркою, і це сприяє скороченню часу сканування, порівняно зі звичайним клінічним скануванням.
Як показано на рис. 1, існує два процеси корекції твердого тіла. Спочатку процес відбору даних використовує алгоритми виявлення руху, щоб усунути дані з сильним рухом. Після цього процес корекції руху твердого тіла використовує дані, що залишилися, і виконує оцінку як кількості руху (оцінка руху), так і зображень без руху (оцінка зображення) шляхом винайденя невідомих параметрів.
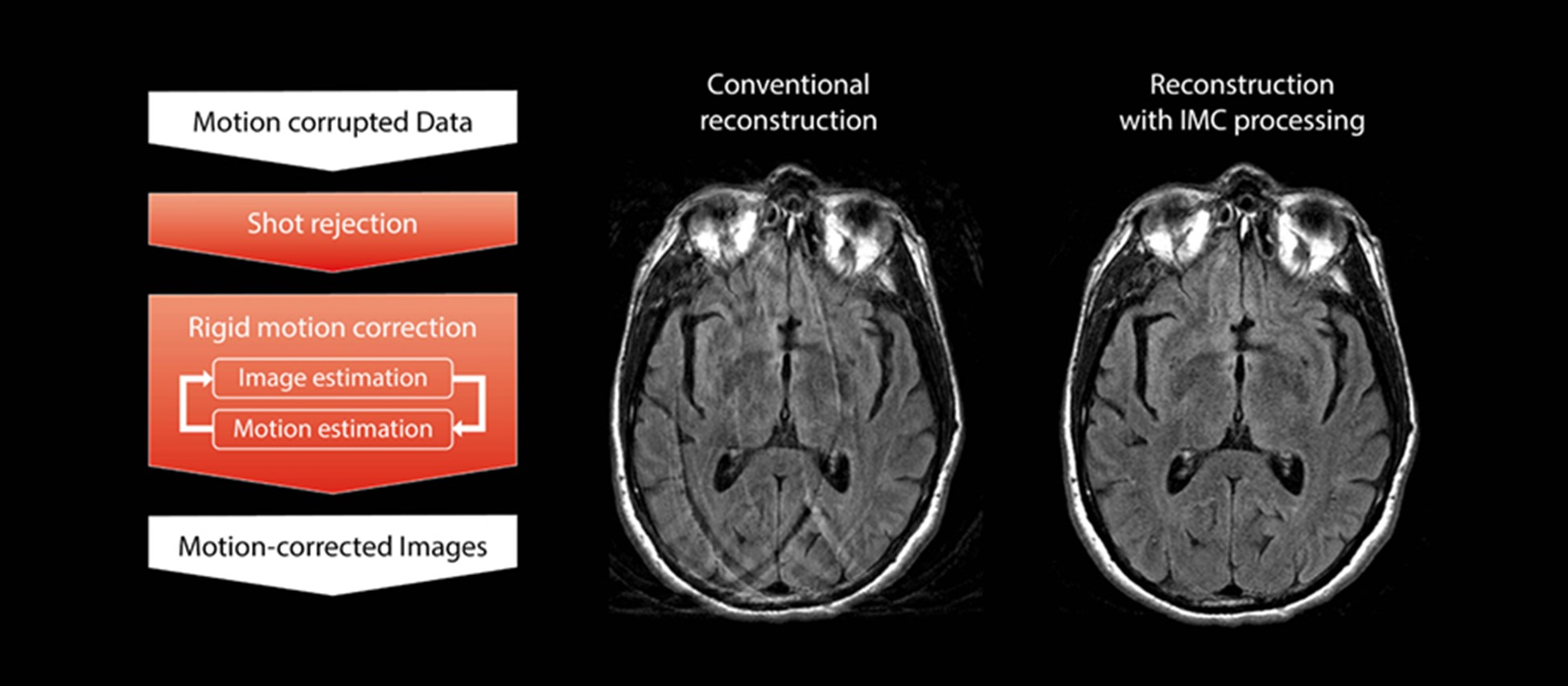
Рис. 1: Блок-схема процесу реконструкції Ітеративної Корекції Руху для руху твердого тіла (ліворуч) і порівняння зображень із/без IMC (праворуч)
Процес оцінки зображення використовує метод Conjugate Gradient SENSE (SENSitivity Encoding) для оцінки очікуваного остаточного реконструйованого зображення на основі зібраних даних із неповною вибіркою. Потім процес оцінки руху моделює дані k-простору з певною кількістю руху тіла шляхом додавання параметрів руху (величини поступального та обертального руху). Змодельовані та фактично зібрані дані порівнюються в області зображення, щоб знайти значення для невідомих параметрів з мінімальною помилкою.
Оскільки помилка не може бути мінімізована цією обробкою лише за один раз, оцінка зображення та оцінка руху повторюються по черзі та ітеративно. Наприкінці, отримується реконструйоване зображення, зі зменшеним впливом руху.
IMC коригує не тільки рухи твердого тіла, а й рухи нетвердого тіла. Цей процес корекції показано на рис. 2.
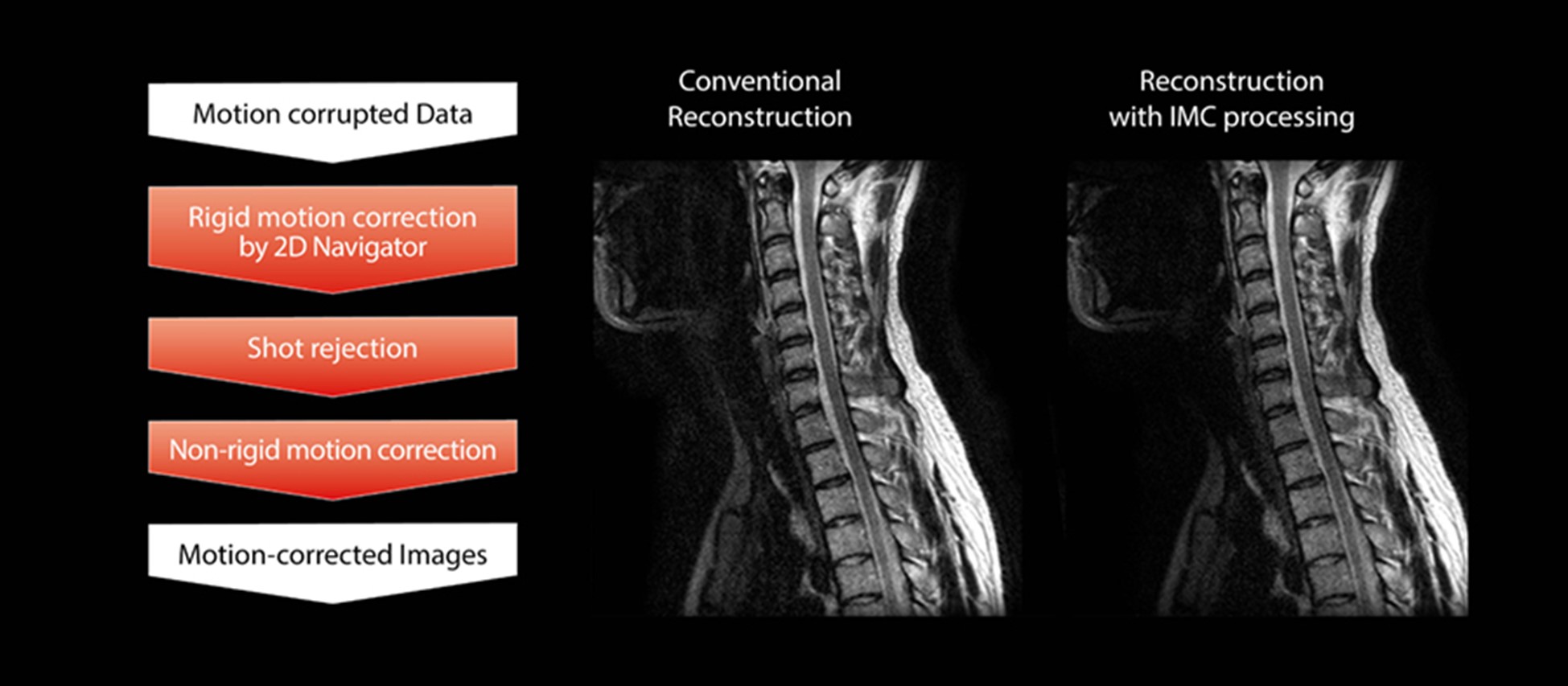
Рис. 2: Блок-схема обробки реконструкції ітеративної корекції руху для руху нежорсткого тіла (ліворуч) і порівняння зображень із/без IMC (праворуч).
Як показано на рисунку, корекція руху нетвердого тіла спочатку виконується за допомогою 2D навігаційної послідовності. Це відрізняється від описаного раніше методу, який по черзі виконує корекцію твердого тіла та реконструкцію паралельного зображення, однак ціллю для руху, який потрібно виправити, є той самий поступальний і обертальний рух. Потім виконується відхилення неправильних даних, щоб зберегти точність корекції шляхом виключення даних із великими змінами. Потім виконується корекція нежорсткого тіла.
Корекція нежорсткого тіла використовує процес створення синтетичних даних із даних неповної вибірки в k-просторовій області. Одна лінія в напрямку RO розглядається в k-просторі отриманих даних після корекції твердого тіла. Отримані дані порівнюються з синтетичними даними, створеними шляхом оцінки навколишніх даних. Якщо узгодженість погана, на отримані дані, ймовірно, вплинули рухи пацієнта, і вони заміняються синтетичними даними. Таким чином, можна підготувати дані k-простору, зі зменшеним впливом руху в цілому, і, нарешті, отримати реконструйоване зображення, в якому вплив руху на якість зображення зменшений.
В заключній 3-й частині буде розглянуто приклади застосування цієї технології та наведено порівняння із звичайними методами збору даних в пацієнтів, що рухаються.
Останні новини та події